一、当老照相馆在数字世界“永生”
还记得杭州那座承载60年记忆的老照相馆吗?群核科技工程师用3D高斯溅射技术将它完整迁移到云端,用户可自由切换视角“漫步”其中,连木纹裂痕和褪色海报都清晰可见。而这项技术,如今正成为机器人理解物理世界的关键钥匙!
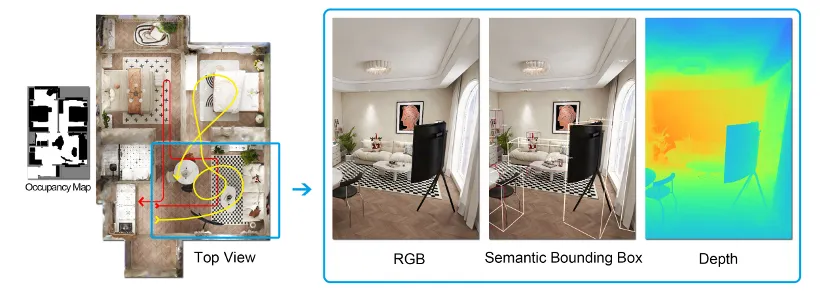
2025年7月25日,群核科技正式发布InteriorGS数据集——全球首个面向智能体自由运动的大规模3D高斯语义数据集。这意味着,机器人终于能像人类一样感知“沙发可坐、门可推开、杯子会倾倒”的物理规则,迈向真正的空间智能时代!
二、产品介绍:什么是InteriorGS?
1. 公司背景
群核科技(Manycore Tech)作为“杭州六小龙”之一,深耕空间智能领域14年,旗下拥有酷家乐(全球最大空间设计平台)及SpatialVerse仿真平台。2023年其空间理解模型SpatialLM开源即登顶HuggingFace趋势榜,谷歌、斯坦福等顶尖机构均采用其数据。
2. 数据集亮点
| 特性 | 传统数据集 | InteriorGS |
|---|---|---|
| 场景规模 | 静态图像/视频 | 1000+动态3D高斯场景 |
| 环境覆盖 | 单一场景 | 超80种室内环境(家居/商超/工厂等) |
| 语义深度 | 几何结构 | 物体功能+空间关系(如“门可开关”) |
| 物理真实性 | 基础碰撞检测 | 重力/摩擦/材质物性模拟 |
三、谁需要这份“空间大脑”?
- 机器人开发者:解决“叠被子困境”(理解指令却无法执行)
- 具身智能企业:智元机器人、银河通用等已接入测试
- AR/VR应用团队:构建物理正确的虚拟交互空间
- 文化遗产保护者:低成本高精度保存三维历史场景
四、5大核心功能与技术揭秘
? 1. 秒级3D场景重建
技术原理:输入手机拍摄视频 → 3D高斯溅射技术将场景解构为百万级椭圆点云,相比传统面片建模效率提升90%。
应用价值:30秒生成可自由穿行的烘焙店/病房等定制场景!
? 2. 空间语义注入
技术原理:通过自研SpatialLM大模型解析物体功能(如“椅子可承重”)、空间关系(如“冰箱在橱柜左侧”)。
案例:机器人识别“叠放被子”需满足平整度阈值,而非仅视觉匹配。
? 3. 物理仿真引擎
技术链:
3D高斯场景 → SpatialVerse物理引擎 → 模拟重力/摩擦/材质变形 → 生成10万+交互轨迹突破:让机器人预演“水杯倾倒”的液体流动路径,避免现实事故。
? 4. 动态视角训练
技术原理:采用视角无关渲染(View-Independent Rendering),支持智能体任意角度观察物体遮挡、光影变化。
效果:机器人绕过桌腿捡球成功率提升67%!
? 5. 零设备数据采集
革命性突破:仅需普通手机视频即可建模,摆脱昂贵传感器阵列。
开发者反馈:“用民宿监控视频生成了训练场,成本直降80%!”
五、工具使用技巧:3步榨干InteriorGS!
✅ 技巧1:多光源扫描法
拍摄物体时环绕打光3次(前侧光/背光/顶光),点云细节完整度提升40%
✅ 技巧2:语义标签扩增
在HuggingFace下载数据后,用此代码添加自定义标签:
from spatialLM import SemanticInjector
injector.load("kitchen.gs")
injector.add_property("冰箱", "开门角度=110°") # 定义交互参数 ✅ 技巧3:物理规则微调
在SpatialVerse中修改材质物性:
simulator.set_material("玻璃杯", {
"friction": 0.2,
"fragility": 0.9 # 碎裂阈值
}) 六、现在就体验未来!
? 访问地址
- 数据集下载:
[HuggingFace] ?https://huggingface.co/datasets/spatialverse/InteriorGS
[GitHub] ?https://github.com/manycore-research/InteriorGS
? 现场体验:
2025 WAIC世界人工智能大会(上海世博馆H3-C901),群核展台可亲手操作机器人仿真训练系统!
一句戳心:当机器人能轻手轻脚为你递来一杯满到杯沿的咖啡时,别忘了InteriorGS曾教它计算过283次液体晃动轨迹✨
群核科技首席科学家唐睿指出:“Sim2Real(虚拟到现实)是具身智能的最短路径”。InteriorGS构建的不仅是数据集,更是机器认知物理世界的“语言教科书”——当机器人理解“柔软的被褥可折叠但瓷碗不可捏握”,人工智能才真正拥有了行动的尊严。
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章




暂无评论...