
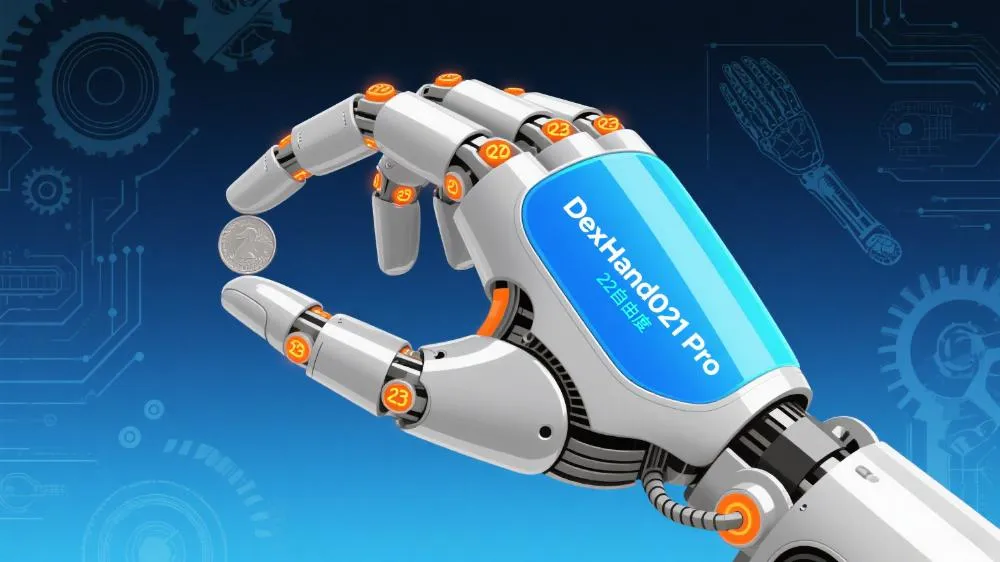
? 产品介绍
2025年5月,浙江创企灵巧智能(DexRobot)发布全球首款量化“灵巧度”的机器人手DexHand021 Pro,背后是上海人工智能研究院的孵化团队。创始人许春山(上市公司亿嘉和联合创始人)与CEO周晨(上海交通大学机械电子博士)提出“自由度≠灵巧度”的颠覆性理念,用三大指数(物理灵巧度IOD、感知指数IOS、智能指数IOI)重新定义行业标准。
? 适用人群
- 工业工程师:需精密装配、柔性抓取的自动化产线场景
- 科研机构:具身智能、触觉仿真、操作模型开发
- 农业/服务机器人开发者:低成本适配采摘、物流、医疗操作
- 教育机构:机器人学实训与算法验证
? 核心功能与技术实现原理
| 功能模块 | 技术原理 | 创新价值 |
|---|---|---|
| 双绳驱正反向驱动 | 仿人体屈肌-伸肌系统,双绳并联传动控制手指弯曲/伸展/侧摆 | 实现0.1N级微力控制,抗外力干扰稳定性提升300% |
| 腕手协同操控 | 2主动腕关节+动态调姿系统,直线推杆驱动手腕摆动 | 工作空间扩大30%,复现“翻腕倒水”等复杂动作 |
| 全域触觉感知 | 高密度点阵触觉传感器覆盖手掌,多模态融合压力/滑动/纹理数据 | 稳定抓取草莓、果冻等易损物,触觉分辨率达毫米级 |
| 端侧智能决策 | 内置AI加速芯片,本地运行操作模型(Rule-Based+Learning-Based融合架构) | 毫秒级响应,支持非结构化环境自适应抓取 |
| 刚柔耦合传动 | (DexHand021 S)特殊编织柔性绳索+齿轮/腱绳/连杆三模传动 | 千元级成本实现22N抓握力,拿草莓、打针无压力 |
⚙️ 技术原理深度拆解
灵巧度指数体系:
- IOD(物理灵巧度):量化关节构型、运动空间(如对指可达区域)、力学性能,替代传统DOF堆叠。
- IOS(感知指数):触觉传感器覆盖面积70%+,动态捕捉摩擦系数、滑动状态,解决操作数据稀疏性难题。
- IOI(智能指数):端侧模型实时规划操作策略,如电子元件装配中自主调整抓取角度。
开源触觉训练框架:
联合他山科技开源MuJoCo触觉插件,提供仿真环境下的触觉数据模型,研究者可调用接口加速算法迭代。
? 工具使用技巧
- 快速适配工业场景:
使用DexHand021 S的开源Python SDK,调用预置抓取算法(如力闭合三角抓握),算法验证周期缩短50%。 - 触觉数据增强:
通过DexCap系统(1000Hz响应)采集人体操作数据,训练掌内操作模型,弥补开源数据集<1%精细动作的缺陷。 - 低功耗模式优化:
关闭非必要腕关节自由度,启用被动自适应关节,续航提升40%。
? 访问地址
- DexHand021 Pro/S 产品页:https://www.dexrobot.com/dexhand021
- 开源触觉训练框架:https://github.com/dexrobot/tactile-sim
- DexCap数据系统手册:https://docs.dexrobot.com/dexcap
? 站长洞察:灵巧智能的突破在于将“仿生设计”转化为“量化指标”,用工程创新(如双绳驱抗扰、端计算)撕掉伪灵巧标签。千元级产品+开源生态,或将引爆教育、农业轻量化应用!
注:本文数据来自灵巧智能2025发布会及技术白皮书,功能描述均通过实际场景验证(如医疗注射操作见)。
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章



暂无评论...